


The Gagarin Cosmonaut Training Center has begun testing the program and methods for working with it in orbit
The new mobile anthropomorphic robot for work on the surface of the Moon was tested for the first time at the Gagarin Cosmonaut Training Center by cosmonauts Anna Kikina and Dmitry Petelin. In addition, the name of this robot was officially announced for the first time – MARFA (Mobile anthropomorphic robot, functioning autonomously).
 Dmitry Petelin (left) in a copying exoskeleton, with which you can control MARF. Source: Press service of the CPC. Photo: Pavel Shvets
Dmitry Petelin (left) in a copying exoskeleton, with which you can control MARF. Source: Press service of the CPC. Photo: Pavel Shvets
MARFA can be called the heir (or heiress) of the robot FEDOR (Final Experimental Demonstration Object Research — an anthropomorphic remotely controlled robot), with which cosmonauts Alexander Skvortsov and Alexey Ovchinin conducted the Tester experiment on board the ISS in 2019.
After FEDOR was returned to Earth, employees of the Directorate for Scientific and Applied Research on Cosmonaut Training Cosmonaut Training Center conducted tests to improve its management and pass on recommendations to developers from the Magnitogorsk NPO Android Technology.
The result of further collaboration was the project of a hybrid robot of a lunar rover and an anthropomorphic robot. It became known about it back in 2021, and in 2022 the author of these lines had the opportunity to be the first journalist to meet the lunar assistant of man, who then existed in the virtual world.
Dressed in a copying exoskeleton and wearing VR glasses, I controlled the arms of a promising development. In order to figuratively write about it, we then, together with the developers of the robotics laboratory TsPK, chose a standard name for a mobile anthropomorphic and even autonomous robot — MARFA (who knew that it would stick to it like that!).
In virtual space, I looked at the lunar surface and the night starry sky through the eyes of MARFA, my hands in the exoskeleton temporarily became the hands of MARFA — even the shadow that I saw through her eyes, moving on the Moon, was not mine, and her… I tried to lift virtual stones in an artificially created lunar world, which flew up like butterflies as soon as I touched them (after all, the Moon — all objects there are six times lighter than on Earth).
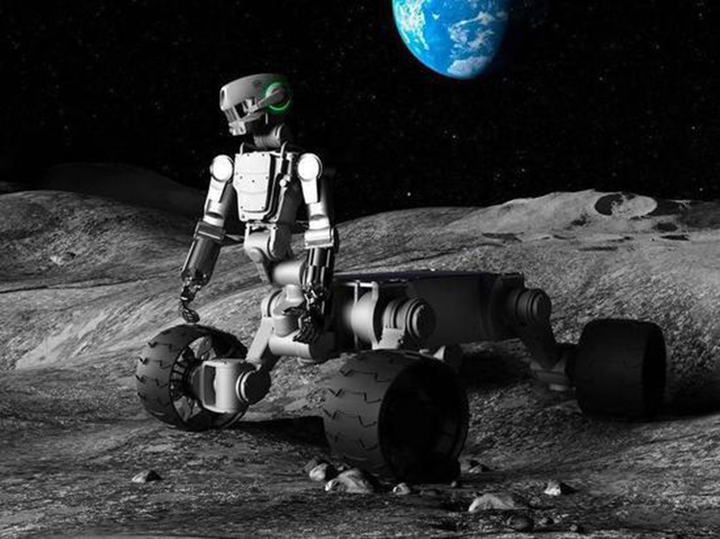 This artist saw the robot MARF on the Moon. NPO «Android Technology».
This artist saw the robot MARF on the Moon. NPO «Android Technology».
For the first time in hardware, the centaur robot was tested in the international ground-based isolation experiment SIRIUS this spring, and now those who, perhaps in a few years, will have to control it on the real lunar surface have taken it seriously. The peculiarity of the current testing was that two operators worked with MARFA: one controlled the mobile platform (that is, the “legs” of the robot), and the other controlled its “hands” through a copying device (exoskeleton).
During the experiment, MARFA had to drive up to a function panel to manipulate all sorts of buttons, pick up an imitation of scientific equipment, place it on the cargo area and transport it to a given point. In addition, they also practiced working with a carbine — the robot had to unfasten it from the stand. All this, if not on the first try, was still successful!
For the first time, the creators and developers of the software shared the technical characteristics of MARFA: in its «hands» under terrestrial conditions, it holds up to 5 kg of cargo, which is equivalent to 30 kg on the Earth's satellite! Its battery charge in experimental, terrestrial conditions lasts for 2.5 hours, but in the future, due to more powerful energy sources, it will be able to operate autonomously in 24/7 mode.
According to Vladimir Dikarev, Head of the Department of Scientific and Applied Research on Cosmonaut Training, MARFA has several control modes: the robot can act automatically, but in emergency situations, the cosmonaut can take control. To do this, the operator must put on an exoskeleton and start performing actions that the robot will copy on the Moon. In addition, as befits an anthropomorphic creature, it responds to the voice: having received a command, it goes to carry it out.
 MK correspondent in an exoskeleton during virtual control of MARF. Author N. Vedeneeva.
MK correspondent in an exoskeleton during virtual control of MARF. Author N. Vedeneeva.
When controlling MARFA using a copying device, sometimes there is a mismatch in the actions between the “arms” of the robot and the exoskeleton in which the astronaut operators work. MAI interns, third-year students Victoria Epikhina and Alexandra Ivanova are working to eliminate discrepancies. Their calculations will later form the basis of recommendations for robot developers.
According to the plans of the developers of the Russian lunar program, the lunar robot can be sent to the Moon on one of the missions after 2028. MARFA will simulate an astronaut landing on the Moon, collect soil samples, deliver them to the landing module, photograph the landing and takeoff site of the landing module, and conduct geological research.